After being briefed on the task at hand, we decided on what kind of method we would want to use to get to move the can. Since our lecturer didn't advise on physically carrying the can, as he didn't talk about the programming of the motor, we finalised on hitting the can across the line.
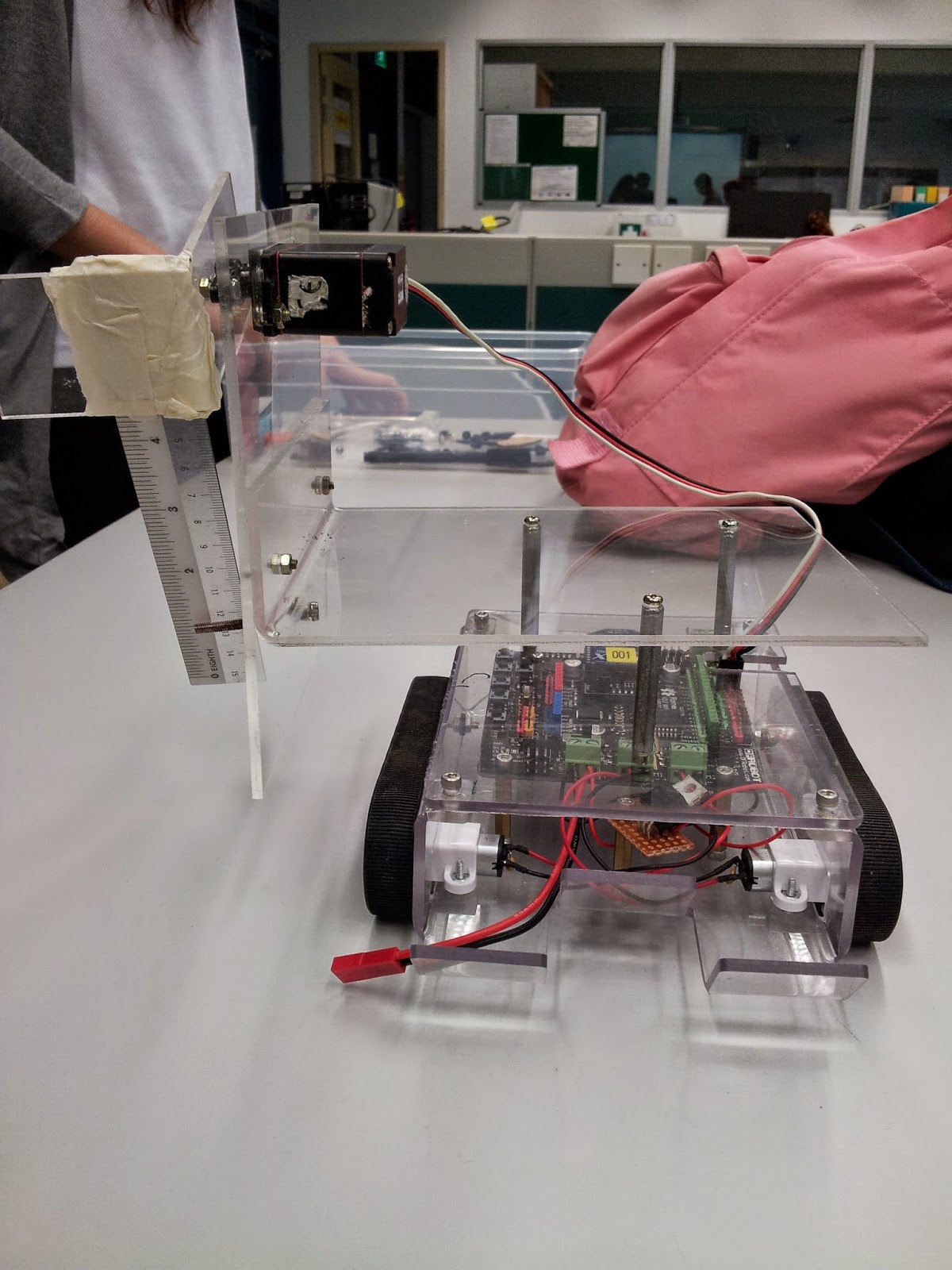
Then was the case of hitting it vertically or horizontally. Hitting it horizontally seemed to induce inaccurate movement of the can, that is it tended to fly or roll more to the side rather than straight down. Hence a vertical swinging arm seemed more appropriate. Also, we decided to put a hook where the arm would strike the can, in a fashion comparable to gripping a rock with leather when using a slingshot. Theoretically it should hit the can at a similar angle every time. Also weighing the car down, identical to how trucks that have heavy moving machinery retract weights to that the truck itself is lifted of the ground, lowering the centre of gravity and as such making the car less prone to movements after striking the can.